





摘要:本文将详细介绍无人机航拍三维建模的步骤。通过无人机高空拍摄,获取目标区域的高清影像,再经过图像处理软件处理,生成正射影像图。结合三维建模技术,将影像数据转化为三维模型,呈现更直观、更真实的效果。整个过程涉及影像获取、数据处理、模型构建等多个环节,为城市规划、环境监测等领域提供有力支持。
本文目录导读:
随着科技的飞速发展,无人机航拍技术已广泛应用于各个领域,其中三维建模更是成为无人机航拍的重要应用领域之一,无人机航拍三维建模技术以其高效、精确的特点,为地形测绘、城市规划、环境监测等领域提供了极大的便利,本文将详细介绍无人机航拍三维建模的步骤,帮助读者更好地理解和掌握这一技术。
无人机航拍前期准备
1、选择合适的无人机
在进行无人机航拍之前,首先需要选择一款合适的无人机,无人机的选择需根据任务需求、环境特点、飞行条件等因素进行综合考虑,高质量的航拍图片需要性能较高的无人机,因此需要根据实际情况进行选择。
2、选定拍摄区域
选定拍摄区域是无人机航拍的第一步,根据任务需求,确定需要拍摄的区域,并了解该区域的地理、气候、飞行高度等条件,以便为后续的航拍工作做好准备。
无人机航拍过程
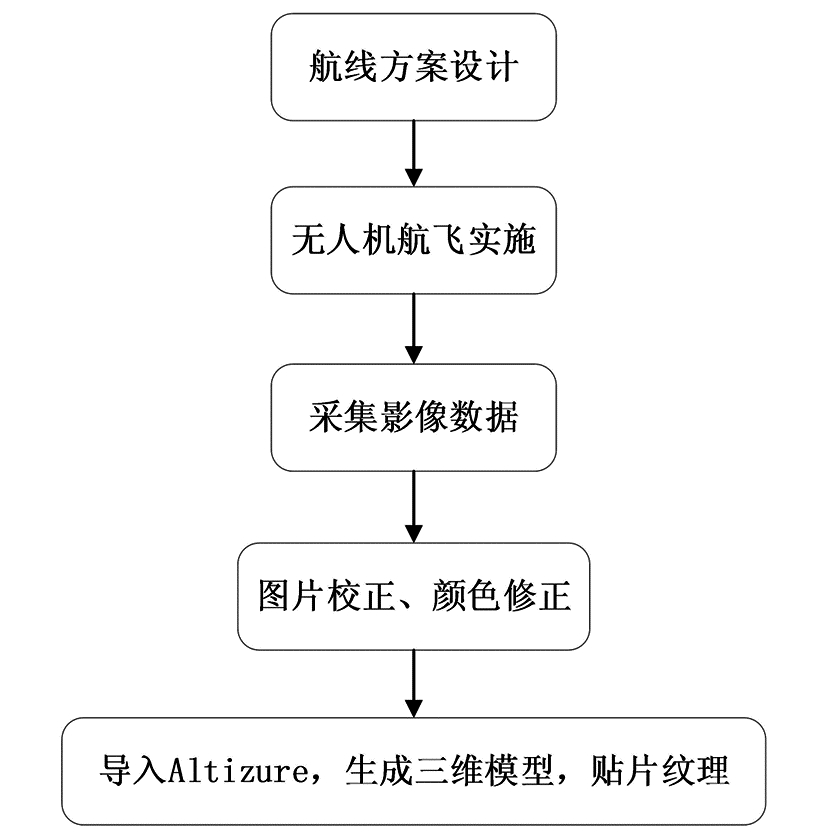
1、设定飞行路线
在选定拍摄区域后,需要设定无人机的飞行路线,飞行路线的设定需充分考虑拍摄区域的地形、气候等因素,确保无人机能够安全、稳定地飞行,并获取高质量的航拍图像。
2、航拍图像获取
按照设定的飞行路线,操纵无人机进行航拍,获取高质量的航拍图像,在航拍过程中,需要注意无人机的飞行状态,确保图像的质量。
三维建模步骤
1、图像预处理
获取航拍图像后,首先需要对图像进行预处理,图像预处理包括图像校正、去噪、对比度调整等,以提高图像的质量,为后续的三维建模提供基础。

2、特征提取
在图像预处理后,需要进行特征提取,特征提取是从图像中提取出有利于三维建模的信息,如边缘、角点等,这些特征信息将用于后续的三维坐标计算。
3、影像匹配与点云生成
通过特征提取后,需要对不同角度的航拍图像进行影像匹配,生成点云数据,影像匹配是根据特征信息,将不同角度的航拍图像进行匹配,从而得到空间中的三维坐标,点云数据是影像匹配的结果,包含了拍摄区域的三维坐标信息。
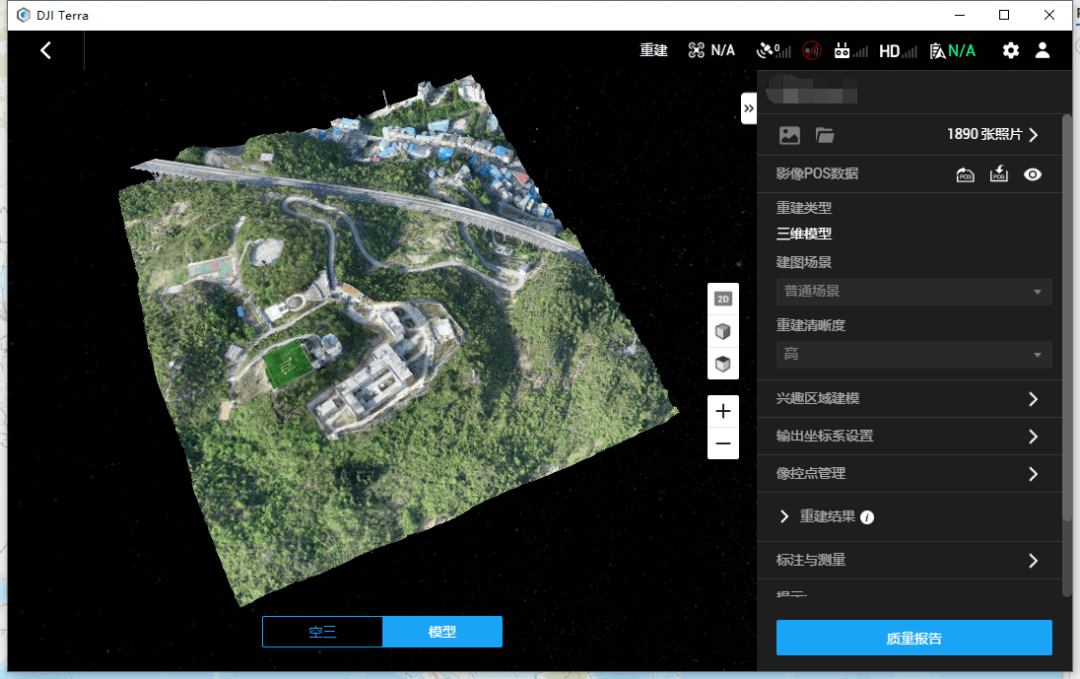
4、三维模型构建
在获取点云数据后,需要构建三维模型,三维模型的构建可以通过多种方法实现,如基于图像的三维重建、基于点云数据的三角网格化等,根据实际需求选择合适的构建方法,将点云数据转化为三维模型。
5、模型优化与后期处理
构建完成三维模型后,需要进行模型优化与后期处理,模型优化包括去除模型中的噪声、填补模型中的空洞等,以提高模型的质量,后期处理包括纹理贴图、模型渲染等,使模型更加真实、生动。
无人机航拍三维建模技术是一项具有重要应用价值的技术,其在地形测绘、城市规划、环境监测等领域具有广泛的应用前景,本文详细介绍了无人机航拍三维建模的步骤,包括前期准备、航拍过程、三维建模等环节,通过掌握这些步骤,读者可以更好地理解和应用无人机航拍三维建模技术,为相关领域的研究和应用提供便利。
 京公网安备11000000000001号
京公网安备11000000000001号 京ICP备11000001号
京ICP备11000001号
还没有评论,来说两句吧...